Isaac Sim 导入 URDF 问题排查记录
本文记录一次将 jaka_zu3.urdf 导入 Isaac Sim 的排查过程,目标是生成可用的 USD 机器人模型。
0. 前提
本文使用的本地目录结构如下:
jaka_zu3/
├── jaka_zu3.urdf
└── meshes/
└── jaka_zu3_meshes/
├── Link_0.STL
├── Link_1.STL
├── Link_2.STL
├── Link_3.STL
├── Link_4.STL
├── Link_5.STL
└── Link_6.STL
1. 基本导入流程
1.1 启用 URDF Importer
在 Isaac Sim 中打开:
Window -> Extensions- 搜索并启用
isaacsim.asset.importer.urdf
1.2 打开导入窗口
进入:
File -> Import
然后选择 jaka_zu3.urdf。
1.3 初始导入参数
推荐先使用以下保守配置:
Referenced ModelStatic BaseDefault Density = 1000- 初次导入时先关闭:
Collision From VisualsAllow Self-Collision
- 如果模型包含 mimic 关节,可先勾选:
Ignore Mimic
1.4 设置 USD 输出目录(可选)
URDF Importer 只能选择输出目录,不能直接命名 USD 文件。Isaac Sim 会自动生成如下结构:
输出目录/URDF文件名/URDF文件名.usd
例如,若输出目录选择为:
~/robot-assets/isaac_assets/
则最终生成的文件通常为:
~/robot-assets/isaac_assets/jaka_zu3/jaka_zu3.usd
2. 主要问题与处理方法
这次导入失败主要集中在以下几类问题:
- USD 输出目录中已存在旧文件
- mesh 文件缺失或目录结构不匹配
- URDF 中的 mesh 路径写法错误
- Linux 下文件扩展名大小写不一致
- STL 模型本身不包含材质信息
2.1 USD 输出路径冲突
最初导入时出现如下报错:
A layer already exists with identifier '.../jaka_zu3.usd'
原因:
目标路径下已经存在同名 USD 文件。Importer 会调用 CreateNew,不会直接覆盖旧文件。
处理方法: 删除旧输出目录或旧 USD 文件后重新导入。例如:
rm -rf ~/robot-assets/isaac_assets/jaka_zu3
2.2 只有 URDF,没有 mesh
起初目录中只有:
jaka_zu3.urdf
缺少 mesh 文件时,导入容易失败,或者导入后显示为空。
处理方法: 从 JAKA ROS2 仓库补齐 mesh 文件。需要的目录为:
src/jaka_description/meshes/jaka_zu3_meshes
2.3 mesh 目录结构与 URDF 引用不一致
URDF 中引用的路径必须与本地目录结构严格一致,否则需要改 URDF 源码路径。
本文使用的本地目录结构如下:
jaka_zu3/
├── jaka_zu3.urdf
└── meshes/
└── jaka_zu3_meshes/
├── Link_0.STL
├── Link_1.STL
├── Link_2.STL
├── Link_3.STL
├── Link_4.STL
├── Link_5.STL
└── Link_6.STL
如果本地目录层级与 URDF 中的引用不一致,即使文件已经下载完成,Importer 仍然无法正确解析资源。
2.4 package:// 写法错误
最初 URDF 中使用了如下写法:
<mesh filename="package://meshes/jaka_zu3_meshes/Link_0.STL"/>
这类写法在当前场景下是错误的。
原因:
package:// 表示 ROS package 路径,而不是普通本地相对路径。package://meshes/... 等价于“存在一个名为 meshes 的 ROS 包”,但当前这里只是本地文件夹,并不是 ROS package。
更稳妥的写法: 如果直接从本地目录导入 Isaac Sim,建议使用相对 URDF 文件所在目录的相对路径:
<mesh filename="meshes/jaka_zu3_meshes/Link_0.STL"/>
2.5 Linux 下文件名大小写不一致
这是本次排查中最容易忽略、但影响最大的一个问题。
磁盘中的实际文件名为:
Link_0.STLLink_1.STL- …
但 URDF 中最初写成了:
Link_0.stlLink_1.stl
在 Linux 下,Link_0.stl 和 Link_0.STL 是两个不同文件。结果是 Importer 无法找到 mesh,并最终报错:
RuntimeError: Used null prim
处理方法:
将 URDF 中所有 .stl 统一改为 .STL,保证与磁盘文件名完全一致。
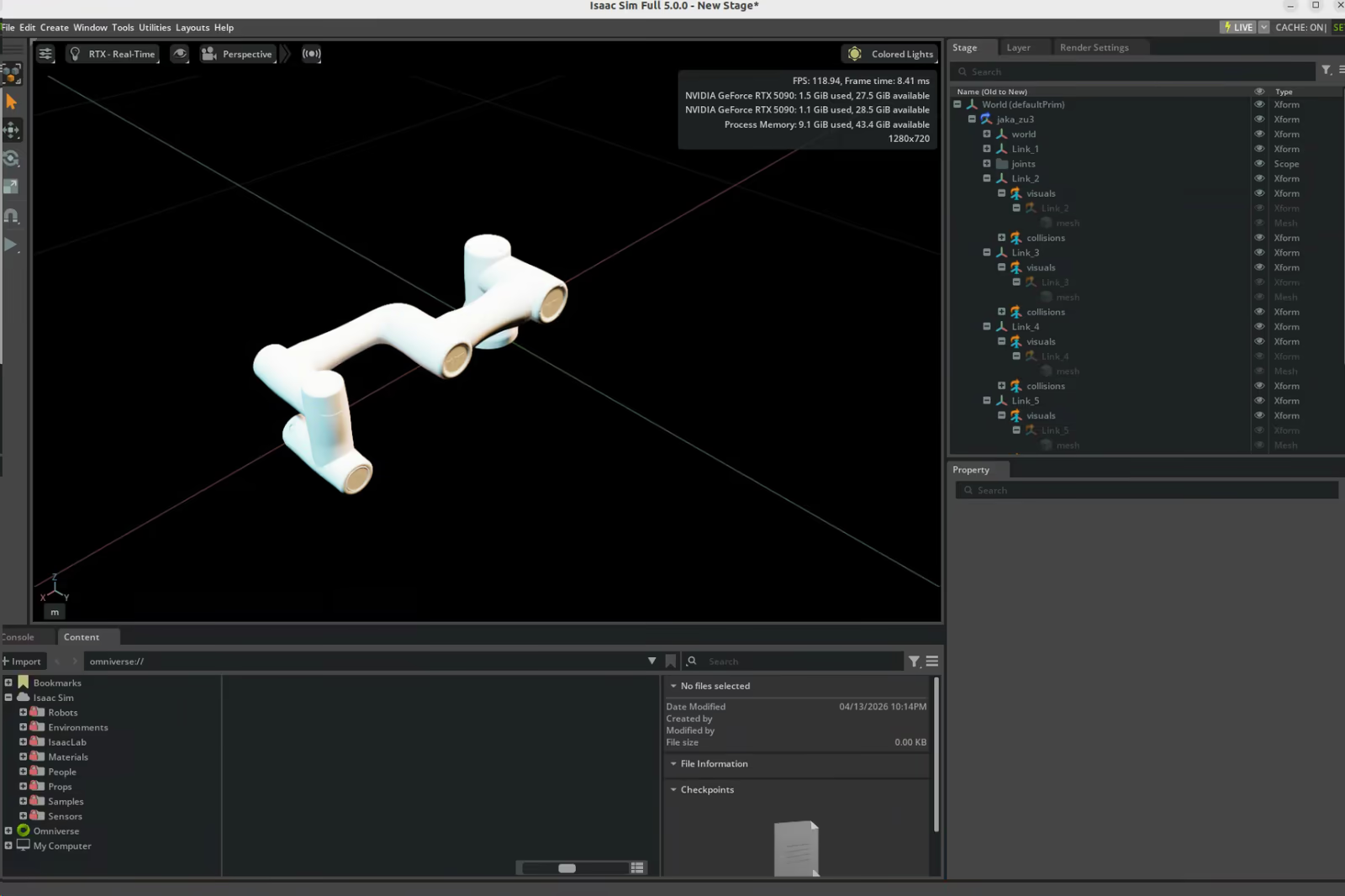
2.6 STL 不包含材质,导入后模型会显示为白色
导入成功后,机械臂模型显示为全白。
原因:
JAKA 提供的 ROS 模型只有 .STL 文件,没有:
.dae.fbx- 贴图
- 材质文件
STL 只包含几何信息,不包含真实材质。
结论: 模型显示为白色并不代表导入失败,而是“缺少材质信息”这一格式特性带来的正常现象。
3. 可工作的 URDF mesh 写法示例
<visual>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<mesh filename="meshes/jaka_zu3_meshes/Link_0.STL" />
</geometry>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0" />
<geometry>
<mesh filename="meshes/jaka_zu3_meshes/Link_0.STL" />
</geometry>
</collision>
关键点如下:
- 不使用
package:// - 路径与本地目录严格一致
- 文件扩展名大小写严格一致
4. 导入成功后的补充说明
4.1 颜色与材质
由于 STL 不带材质,导入完成后如需调整外观,需要在 Isaac Sim 中手动赋材质,例如:
- 创建
OmniPBR - 修改
Albedo / Base Color - 将材质绑定到对应 link 或整个机器人
4.2 如果希望保留真实外观
需要使用支持材质信息的格式,例如:
.dae.fbx.usd
如果官方仓库只提供 STL,则只能在 Isaac Sim 或 Blender 中自行补做材质。